<dfn id="2awkm"></dfn> <dfn id="2awkm"></dfn> 全球機器人領(lǐng)域最具影響力的學術(shù)會議IROS 2025于10月19日至25日在杭州國際博覽中心舉行。大會收錄的多篇論文的研究成果采用了奧比中光的3D視覺技術(shù),涵蓋自動化掃描、空間建模、人機交互等前沿方向,彰顯了奧比中光在全球機器人與AI視覺研究領(lǐng)域的底層支撐地位。
頂級學術(shù)會議見證技術(shù)實力
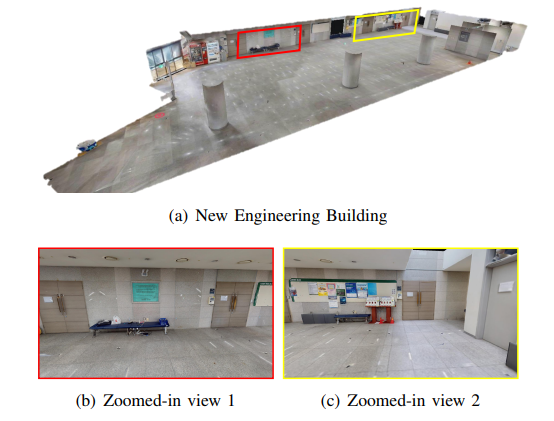
在本屆IROS收錄的論文中,韓國梨花女子大學團隊的“Scanning Bot: Efficient Scan Planning using Panoramic Cameras”提出的“Scanning Bot”系統(tǒng)采用奧比中光Astra相機模組(集成于Matterport Pro2全景攝像系統(tǒng))進行高精度室內(nèi)3D掃描與重建,顯著提升了掃描效率與紋理質(zhì)量[1]。
上海交通大學團隊的論文“Zero-Shot Temporal Interaction Localization for Egocentric Videos”提出了一種可泛化的零樣本模型“EgoLoc”,通過第一視角視頻時序交互定位方法研究人機協(xié)作與模仿學習,利用RGB-D視覺理解人類動作與物體交互。奧比中光的Femto Bolt相機通過采集訓練數(shù)據(jù),為模型的三維理解能力提供關(guān)鍵支撐[2]。
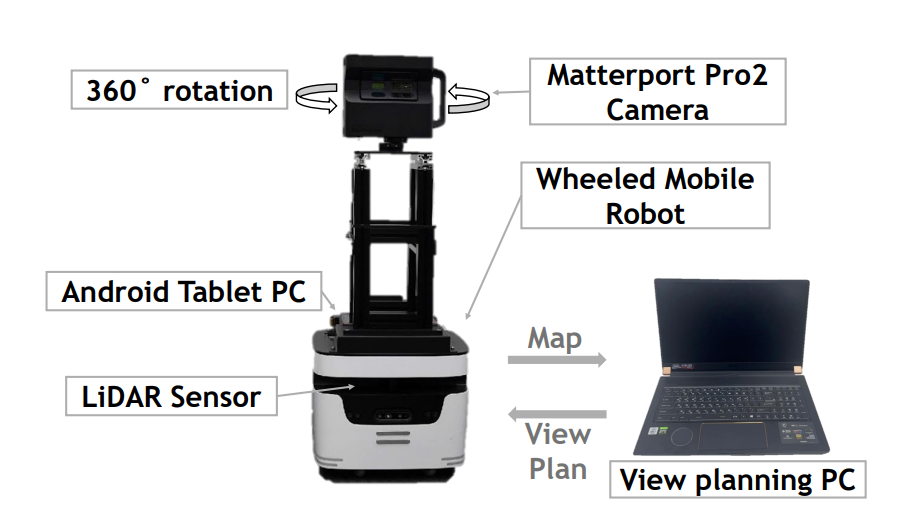
圖片來源:Lee, E., Han, K. M., & Kim, Y. J. (2025). Scanning Bot: Efficient Scan Planning using Panoramic Cameras.
奧比中光相機具備開放的SDK生態(tài)、可調(diào)參的深度質(zhì)量控制、穩(wěn)定的多機位時間同步能力,以及對弱光、低紋理、反光材質(zhì)等復雜場景的魯棒性——這些特性讓科研成果具備更高的可復現(xiàn)性和落地潛力。
具身智能成為IROS 2025核心趨勢
本屆大會特別關(guān)注具身智能(Embodied AI)的發(fā)展,強調(diào)機器人感知、認知與行動的深度融合。大會聚焦無人機、自動駕駛、大語言模型、靈巧手以及具身智能等關(guān)鍵領(lǐng)域,多個工作坊專注于多模態(tài)感知——包括觸覺、視覺和語言模型——在復雜環(huán)境中實現(xiàn)靈巧、適應性的機器人行為。
在這一背景下,這兩篇用到奧比中光相機的論文正好映射出前沿路線的兩個端點:
在交互理解方向,EgoLoc將深度與動力學先驗(如手部三維速度、接觸/分離瞬時特征)顯式并入模型,以期在零樣本或小樣本條件下穩(wěn)定定位“什么時候交互”。
在掃描與重建方向,Scanning Bot則以 “可見性約束 → 視點集最小化 → 路徑可行性 → 總時長最優(yōu)” 為設(shè)計框架,追求覆蓋率>99%的高效端到端掃描流程。
從這些具體研究可以進一步觀察到,IROS 2025凝聚出以下幾條機器人技術(shù)演進的共識:
多機位一致性成為剛需:要維持時序理解與全景拼接性能,外參穩(wěn)定、時間戳準確、低抖動觸發(fā)是基礎(chǔ)保障。
本地化開放生態(tài)優(yōu)于黑盒式集成:ROS 2、Unity/UE 支持、可插拔數(shù)據(jù)流程與深度質(zhì)量調(diào)優(yōu)能力,正在成為評判視覺設(shè)備架構(gòu)設(shè)計的關(guān)鍵要素。
場景魯棒性與一致性評測成為研究指標:弱光、低紋理、反射材質(zhì)環(huán)境下深度穩(wěn)定性不可弱化;覆蓋率、重疊度與總時長等任務級KPI被納入評測協(xié)議和方法目標。
在這些趨勢之中,3D視覺正逐步從“感知工具”躍升為機器人系統(tǒng)中承接物理世界與 AI 決策層的關(guān)鍵橋梁。
持續(xù)賦能全球?qū)W術(shù)與產(chǎn)業(yè)創(chuàng)新
被譽為“機器人研究奧林匹克盛會”的IEEE/RSJ國際智能機器人與系統(tǒng)會議(IROS),是全球機器人領(lǐng)域最具影響力的學術(shù)會議之一,自1988年創(chuàng)辦以來一直推動著機器人技術(shù)的前沿發(fā)展。今年大會匯聚了超過7000名來自全球的專家、學者和業(yè)界專業(yè)人士,展示最前沿的學術(shù)成果和技術(shù)趨勢。
作為“機器人與AI視覺中臺”,奧比中光對結(jié)構(gòu)光、iToF、雙目、dToF、激光雷達、工業(yè)三維測量等技術(shù)路線進行了全領(lǐng)域布局,已服務全球超過3000家客戶。公司持續(xù)支持產(chǎn)學研協(xié)作,連續(xù)多年參與中國三維視覺大會(China3DV)和CVPR等國際學術(shù)會議。奧比中光為全球科研與產(chǎn)業(yè)創(chuàng)新提供底層支撐,共同推動3D視覺技術(shù)在機器人、自動化與人機協(xié)作領(lǐng)域的融合創(chuàng)新。
[1] Lee, E., Han, K. M., & Kim, Y. J. (2025). Scanning Bot: Efficient Scan Planning using Panoramic Cameras.
[2] Ma, J., Zhang, E., Zheng, Y. D., Xie, Y., Zhou, Y., & Wang, H. (2025). Zero-Shot Temporal Interaction Localization for Egocentric Videos
分享到





<dfn id="2awkm"></dfn> <dfn id="2awkm"></dfn> 
