

坐標系統(tǒng)
本文內(nèi)容
● 2D坐標系
● 3D坐標系
● 后續(xù)步驟
本文介紹用于 2D 和 3D 坐標系的約定。 每個傳感器設備有關聯(lián)的獨立坐標系,使用校準函數(shù)可以轉換這些坐標系之間的點。 圖像轉換轉換坐標系之間的整個圖像。
2D 坐標系
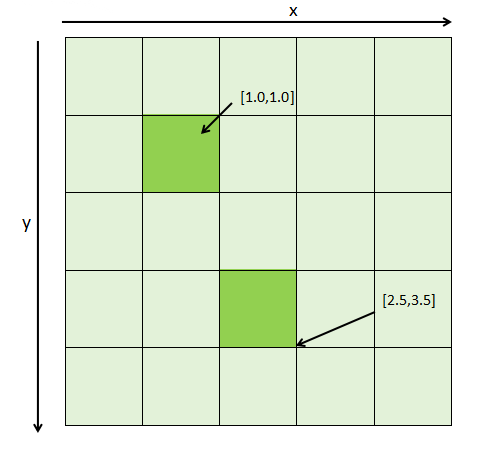
深度相機和彩色相機與獨立的 2D 坐標系相關聯(lián)。 [x,y] 坐標以像素為單位,其中,x 的范圍為 0 到寬度-1,y 的范圍為 0 到高度-1。 寬度和高度取決于所選的深度相機和彩色相機工作模式。 像素坐標 [0,0] 對應于圖像的左上角像素。 像素坐標可以是表示子像素坐標的小數(shù)。
2D 坐標系以 0 為中心,即,子像素坐標 [0.0, 0.0] 表示中心,[0.5,0.5] 表示像素的右下角,如下所示。
3D 坐標系
每個相機、加速度傳感器和陀螺儀都與獨立的 3D 坐標空間系統(tǒng)相關聯(lián)。
3D 坐標系中的點以公制 [X,Y,Z] 坐標三元組的形式表示,單位為毫米。
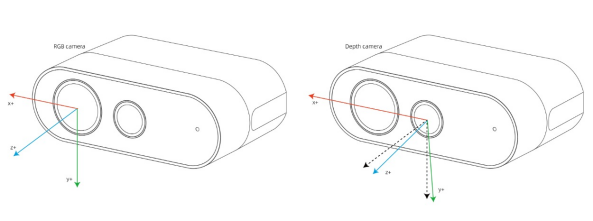
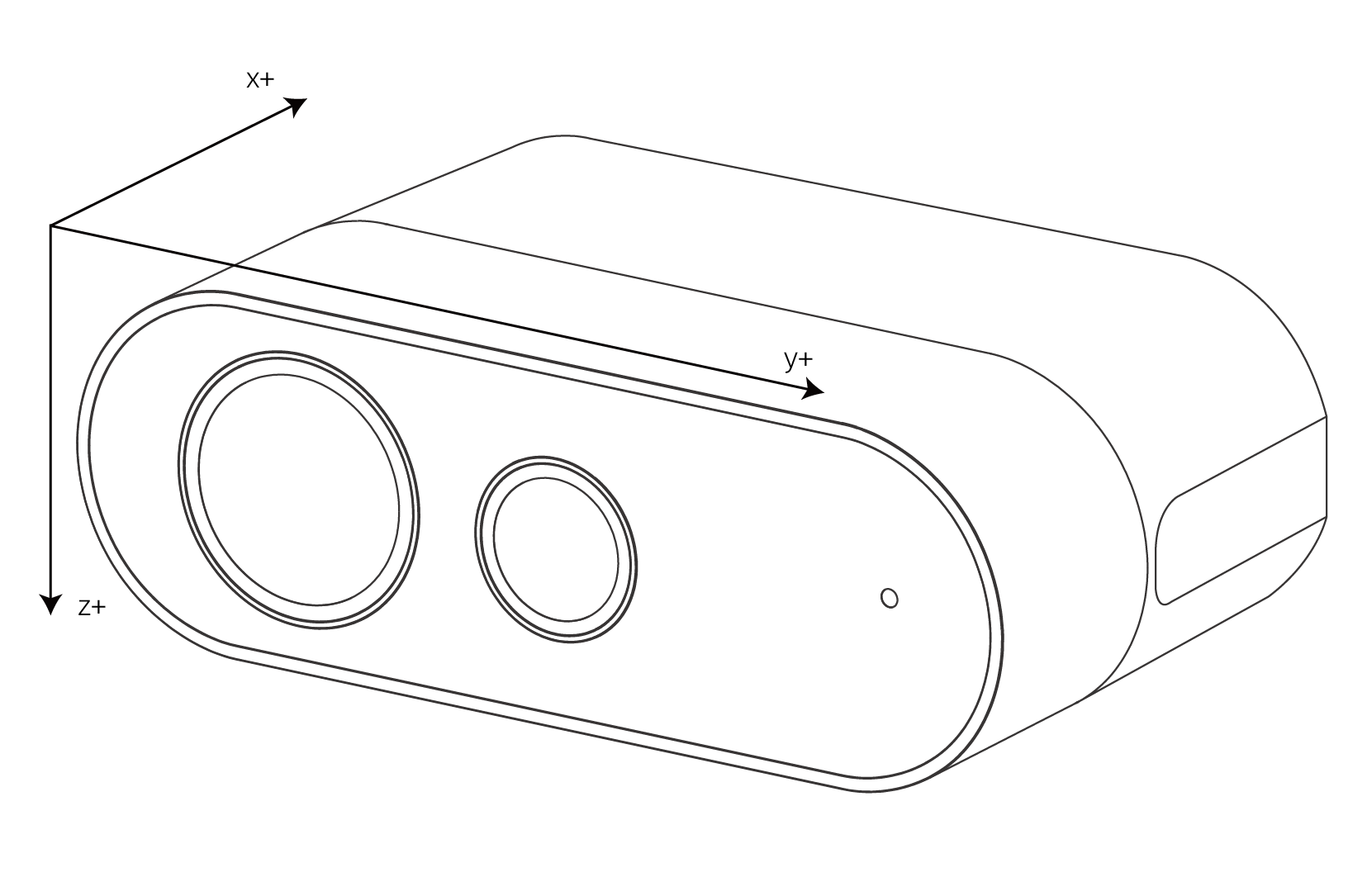
深度相機和彩色相機
原點 [0,0,0] 位于相機焦點處。 坐標系的方向是正 X 軸向右,正 Y 軸向下,正 Z 軸向前。
深度相機向下朝彩色相機傾斜 6 度,如下所示。
深度相機使用兩個照明器。 在窄視場 (NFOV) 模式下使用的照明器與深度相機的用例相符,因此照明器不傾斜。 在寬視場 (WFOV) 模式下使用的照明器相對于深度相機向下額外傾斜 1.3 度。(Mega與Bolt相同)
陀螺儀和加速度傳感器
陀螺儀的原點 [0,0,0] 與深度相機的原點相同。 加速度傳感器的原點與其物理位置相一致。 加速計和陀螺儀的坐標系統(tǒng)為右手坐標系。 坐標系的正 X 軸向后,正 Y 軸向左,正 Z 軸向下,如下所示。(Mega與Bolt相同)
后續(xù)步驟
了解Orbbec SDK 和 Orbbec SDK K4A Wrapper