

K4A 訪問FemtoMega網(wǎng)絡(luò)模式
K4A訪問FemtoMega網(wǎng)絡(luò)模式
快速入門:網(wǎng)絡(luò)訪問設(shè)備應(yīng)用程序
想要開始使用網(wǎng)絡(luò)訪問Femto Mega?本文將幫助你啟動(dòng)并成功運(yùn)行該設(shè)備!
本文將介紹以下函數(shù):
● k4a_device_get_installed_count()
先決條件
1. 《設(shè)置 Femto Mega》并將FemtoMega將固件版本升級(jí)最新1.2.7以上版本;
2. 并安裝 SDK《Orbbec SDK 和 Orbbec SDK K4A Wrapper》
3. 確保Femto Mega和Host主機(jī)在同一個(gè)局域網(wǎng)內(nèi)(做設(shè)備發(fā)現(xiàn)用)
頭文件
只需要一個(gè)頭文件,即 k4a.h。 請確保所選的編譯器設(shè)置為使用 SDK 的庫并包含文件夾。 此外,需要鏈接 k4a.lib 和 k4a.dll 文件。
#include <k4a/k4a.h>
查找 Femto Mega 設(shè)備
可將多個(gè) Femto Mega 設(shè)備連接到計(jì)算機(jī)。
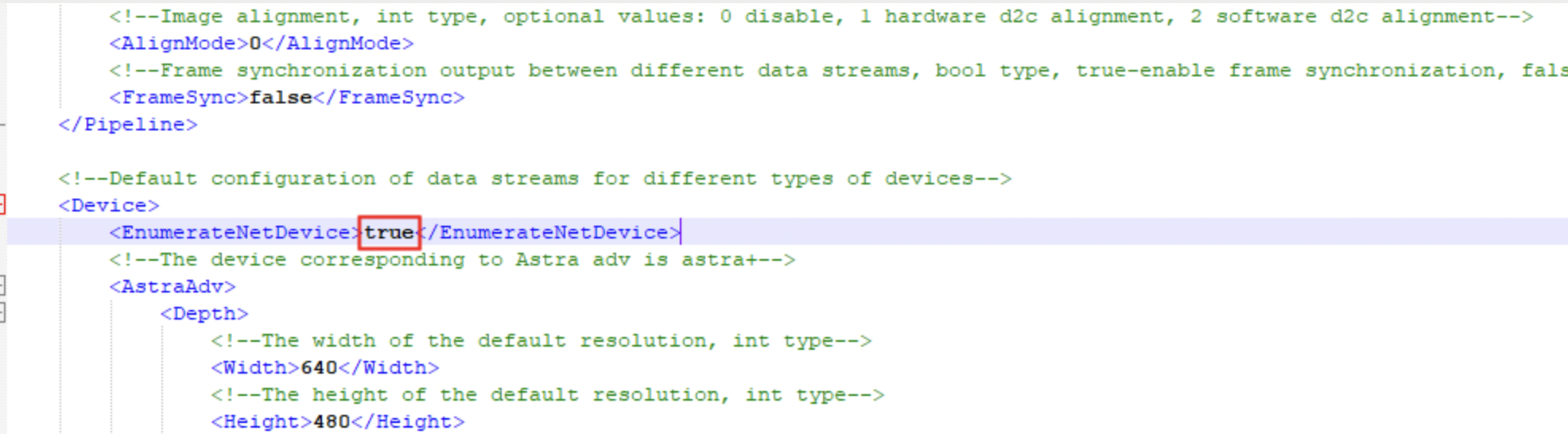
需要默認(rèn)打開網(wǎng)絡(luò)發(fā)現(xiàn)功能(僅局域網(wǎng)有效)
修改OrbbecSDKConfig_v1.0.xml中將EnumerateNetDevice值由false改為true
首先,我們將使用 k4a_device_get_installed_count() 函數(shù)確定有多少個(gè)設(shè)備,或者是否連接了任何設(shè)備。 此函數(shù)應(yīng)可立即運(yùn)行,而無需經(jīng)過附加的設(shè)置。
uint32_t count = k4a_device_get_installed_count();
確定某個(gè)設(shè)備已連接到計(jì)算機(jī)后,可以使用 k4a_device_open() 將其打開。 可以提供想要打開的設(shè)備的索引,或者只對第一個(gè)設(shè)備使用 K4A_DEVICE_DEFAULT。
// Open the first plugged in Kinect device
k4a_device_t device = NULL;
k4a_device_open(K4A_DEVICE_DEFAULT, &device);
與 Azure Kinect 庫中的大多數(shù)內(nèi)容一樣,當(dāng)你打開某種內(nèi)容時(shí),也應(yīng)該在用完時(shí)將其關(guān)閉! 關(guān)閉時(shí),請記得調(diào)用 k4a_device_close()。
k4a_device_close(device);
打開設(shè)備后,可以進(jìn)行測試以確保它正常工作。 讓我們讀取設(shè)備的序列號(hào)!
// Get the size of the serial number
size_t serial_size = 0;
k4a_device_get_serialnum(device, NULL, &serial_size);
// Allocate memory for the serial, then acquire it
char *serial = (char*)(malloc(serial_size));
k4a_device_get_serialnum(device, serial, &serial_size);
printf("Opened device: %s\n", serial);
free(serial);
啟動(dòng)相機(jī)
打開設(shè)備后,需要使用 k4a_device_configuration_t 對象配置相機(jī)。 相機(jī)配置包含大量不同的選項(xiàng)。 請選擇最適合自己方案的設(shè)置。
// Configure a stream of 3840x2160 BRGA color data at 15 frames per second
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_15;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_2160P;
// Start the camera with the given configuration
k4a_device_start_cameras(device, &config);
// ...Camera capture and application specific code would go here...
// Shut down the camera when finished with application logic
k4a_device_stop_cameras(device);
錯(cuò)誤處理
為簡潔起見,我們不會(huì)在某些例子中顯示錯(cuò)誤處理。 但是,錯(cuò)誤處理始終很重要! 許多函數(shù)返回常規(guī)的成功/失敗類型 k4a_result_t,或者包含詳細(xì)信息的更具體的變量,比如 k4a_wait_result_t。 請查看每個(gè)函數(shù)的文檔或 IntelliSense,以了解該函數(shù)預(yù)期顯示的錯(cuò)誤消息!
可以使用 K4A_SUCCEEDED 和 K4A_FAILED 宏檢查函數(shù)的結(jié)果。 因此,除了打開 Femto Mega 設(shè)備以外,我們還可以按如下所示保護(hù)函數(shù)調(diào)用:
// Open the first plugged in Kinect device
k4a_device_t device = NULL;
if ( K4A_FAILED( k4a_device_open(K4A_DEVICE_DEFAULT, &device) ) )
{
printf("Failed to open k4a device!\n");
return;
}
完整源代碼
#pragma comment(lib, "k4a.lib")
#include <k4a/k4a.h>
#include <stdio.h>
#include <stdlib.h>
int main()
{
uint32_t count = k4a_device_get_installed_count();
if (count == 0)
{
printf("No k4a devices attached!\n");
return 1;
}
// Open the first plugged in Kinect device
k4a_device_t device = NULL;
if (K4A_FAILED(k4a_device_open(K4A_DEVICE_DEFAULT, &device)))
{
printf("Failed to open k4a device!\n");
return 1;
}
// Get the size of the serial number
size_t serial_size = 0;
k4a_device_get_serialnum(device, NULL, &serial_size);
// Allocate memory for the serial, then acquire it
char *serial = (char*)(malloc(serial_size));
k4a_device_get_serialnum(device, serial, &serial_size);
printf("Opened device: %s\n", serial);
free(serial);
// Configure a stream of 3840x2160 BRGA color data at 15 frames per second
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_15;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_2160P;
// Start the camera with the given configuration
if (K4A_FAILED(k4a_device_start_cameras(device, &config)))
{
printf("Failed to start cameras!\n");
k4a_device_close(device);
return 1;
}
// Camera capture and application specific code would go here
// Shut down the camera when finished with application logic
k4a_device_stop_cameras(device);
k4a_device_close(device);
return 0;
}
后續(xù)步驟
了解如何使用傳感器 SDK 查找并打開 Femto Mega 設(shè)備。