

ROS 1 教程 將點云可視化
在ROS 1中啟用和可視化點云
本節(jié)演示如何從攝像頭節(jié)點啟用點云數(shù)據(jù)輸出,并使用RViz進(jìn)行可視化,類似于在啟動攝像頭節(jié)點文檔中討論的初始攝像頭節(jié)點設(shè)置。
啟用深度點云
啟用深度點云的命令
要激活深度信息的點云數(shù)據(jù)流,請使用以下命令:
roslaunch orbbec_camera gemini_330_series.launch enable_point_cloud:=true
在RViz中可視化深度點云
運行上述命令后,執(zhí)行以下步驟以可視化深度點云:
1. 打開RViz。
2. 添加一個顯示。
3. 選擇主題進(jìn)行可視化。
4. 將固定框架設(shè)置為以正確對齊數(shù)據(jù)。
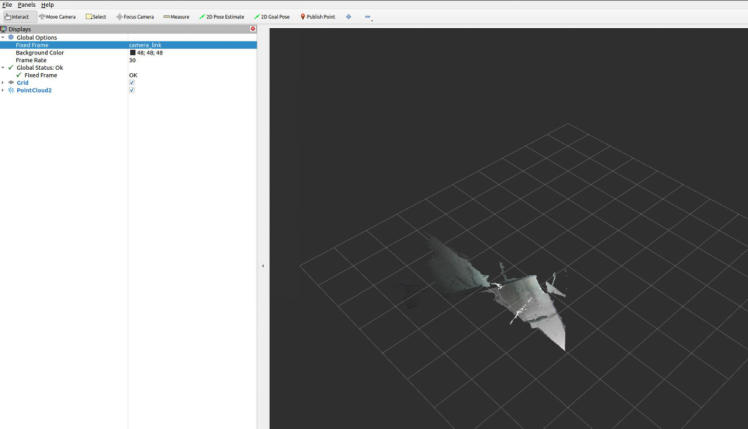
示例可視化
這是在RViz中深度點云可能的樣子:
啟用彩色點云
啟用彩色點云的命令
要啟用彩色點云功能,請輸入以下命令:
ros2 launch orbbec_camera gemini_330_series.launch.py enable_colored_point_cloud:=true
在RViz中可視化彩色點云
要可視化彩色點云數(shù)據(jù):
1. 執(zhí)行命令后啟動RViz。
2. 添加一個顯示面板。
3. 從列表中選擇主題。
4. 確保固定框架設(shè)置為。
示例可視化
RViz中彩色點云的結(jié)果應(yīng)該類似于此: