ROS 2 教程 啟動(dòng)設(shè)備節(jié)點(diǎn)
在ROS 2中啟動(dòng)相機(jī)節(jié)點(diǎn)
本指南提供了使用ROS 2啟動(dòng)啟用彩色點(diǎn)云功能的相機(jī)節(jié)點(diǎn)的指令。
啟動(dòng)節(jié)點(diǎn)的命令
要啟動(dòng)相機(jī)節(jié)點(diǎn),請(qǐng)?jiān)诮K端執(zhí)行以下命令:
ros2 launch orbbec_camera gemini_330_series.launch.py enable_colored_point_cloud:=true
此命令將啟動(dòng)相機(jī)節(jié)點(diǎn)并啟用彩色點(diǎn)云。
發(fā)布的主題
一旦相機(jī)節(jié)點(diǎn)運(yùn)行,它將在多個(gè)ROS主題上發(fā)布數(shù)據(jù)。以下是可用主題的列表:
● IMU數(shù)據(jù)和信息:
○ camera/accel/imu_info
○ camera/gyro/imu_info
○ camera/gyro_accel/sample
● 彩色攝像頭主題:
○ /camera/color/camera_info
○ /camera/color/image_raw
○ /camera/color/image_raw/compressed
○ /camera/color/image_raw/compressedDepth
○ /camera/color/image_raw/theora
○ /camera/color/metadata
● 深度攝像頭主題:
○ /camera/depth/camera_info
○ /camera/depth/image_raw
○ /camera/depth/image_raw/compressed
○ /camera/depth/image_raw/compressedDepth
○ /camera/depth/image_raw/theora
○ /camera/depth/metadata
○ /camera/depth/points
○ /camera/depth_filter_status
○ /camera/depth_registered/points
○ /camera/depth_to_color
○ /camera/depth_to_left_ir
○ /camera/depth_to_right_ir
● 紅外攝像頭主題:
○ /camera/left_ir/camera_info
○ /camera/left_ir/image_raw
○ /camera/left_ir/image_raw/compressed
○ /camera/left_ir/image_raw/compressedDepth
○ /camera/left_ir/image_raw/theora
○ /camera/left_ir/metadata
○ /camera/right_ir/camera_info
○ /camera/right_ir/image_raw
○ /camera/right_ir/image_raw/compressed
○ /camera/right_ir/image_raw/compressedDepth
○ /camera/right_ir/image_raw/theora
○ /camera/right_ir/metadata
● 其他主題:
○ /diagnostics
○ /parameter_events
○ /rosout
○ /rosout_agg
在RViz2中可視化數(shù)據(jù)
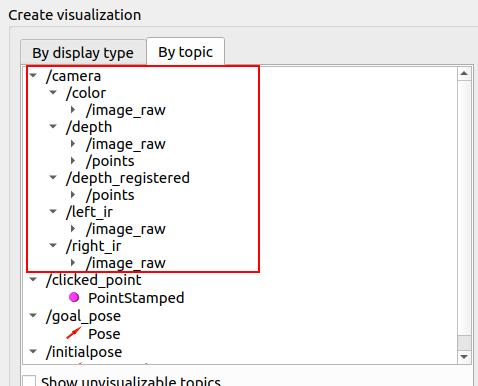
要查看點(diǎn)云或圖像數(shù)據(jù),請(qǐng)使用RViz2:
1. 啟動(dòng)RViz2。
2. 從發(fā)布的主題列表中選擇您希望可視化的主題。
3. 將選定的主題添加到RViz2中開(kāi)始查看數(shù)據(jù)。
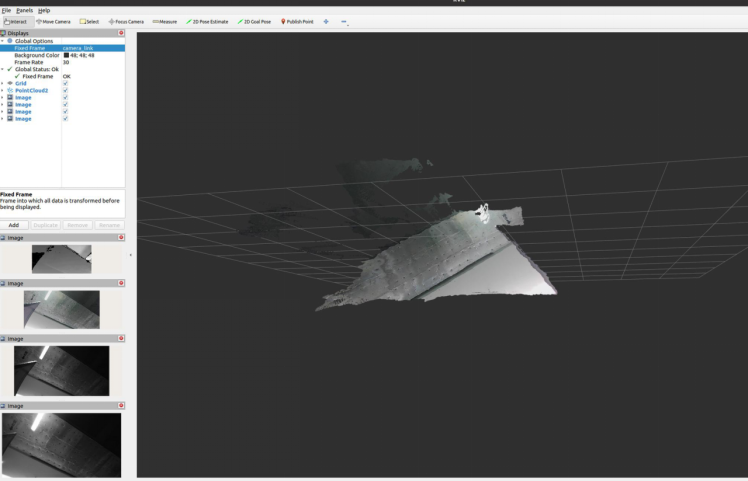
示例可視化
以下是在RViz2中可視化可能出現(xiàn)的示例:
● 點(diǎn)云可視化
● 圖像數(shù)據(jù)可視化