ROS 2 教程 深度和彩色空間對(duì)齊
在ROS 2中將深度圖像與彩色圖像對(duì)齊
本節(jié)介紹如何使用ROS 2將深度圖像與彩色圖像對(duì)齊,以創(chuàng)建疊加圖像。這對(duì)于需要來(lái)自不同傳感器模態(tài)的同步視覺(jué)信息的應(yīng)用程序特別有用。
對(duì)齊并查看深度和彩色圖像的命令
1. 基本的深度到彩色對(duì)齊:
要簡(jiǎn)單地將深度圖像對(duì)齊到彩色圖像,使用以下命令:
ros2 launch orbbec_camera gemini_330_series.launch.py depth_registration:=true
此命令激活深度注冊(cè)功能,但不打開(kāi)查看器。
2. 查看深度到彩色疊加:
如果您希望查看深度到彩色疊加,您需要通過(guò)使用以下命令來(lái)啟用查看器:
ros2 launch orbbec_camera gemini_330_series.launch.py depth_registration:=true enable_d2c_viewer:=true
這將啟動(dòng)具有深度到彩色注冊(cè)的相機(jī)節(jié)點(diǎn),并打開(kāi)一個(gè)查看器以顯示疊加圖像。
在RViz2中選擇主題
要在RViz2中可視化對(duì)齊的圖像:
1. 在運(yùn)行上述命令之一后啟動(dòng)RViz2。
2. 選擇深度到彩色疊加圖像的主題。這里顯示了一個(gè)示例主題選擇:
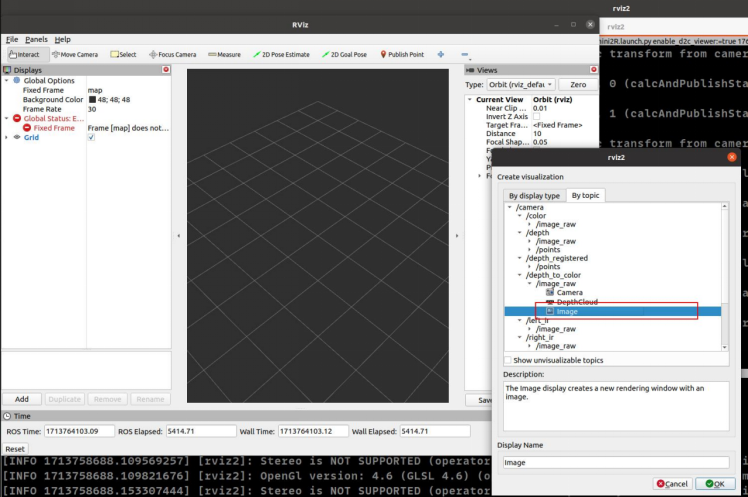
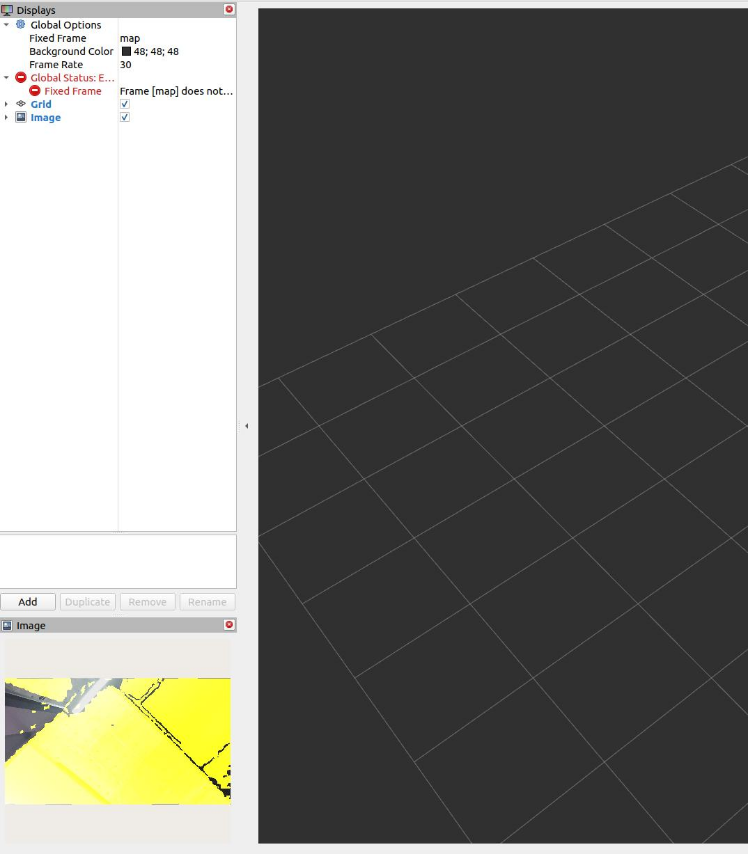
深度到彩色疊加示例
在RViz2中選擇合適的主題后,您將能夠看到深度到彩色疊加圖像。這是它可能看起來(lái)的樣子: