

1. 目的
Gemini 330 新增了支持深度Preset 的更新,由于相機自帶的Preset存放有限;因此我們支持3個Optional Depth Preset的更新,用戶可以根據自身的具體應用場景在奧比提供的Depth Preset release 頁面去下載對應的Preset 更新到相機進行使用,以便提供對應場景的更好深度性能。
2. 適用范圍
適用于Gemini 330 系列固件版本1.4.60及以上的所有產品,SDK版本要求2.3.x及以上版本.
3. 如何更新Preset
3.1 如何通過Orbbec Viewer 更新Preset?
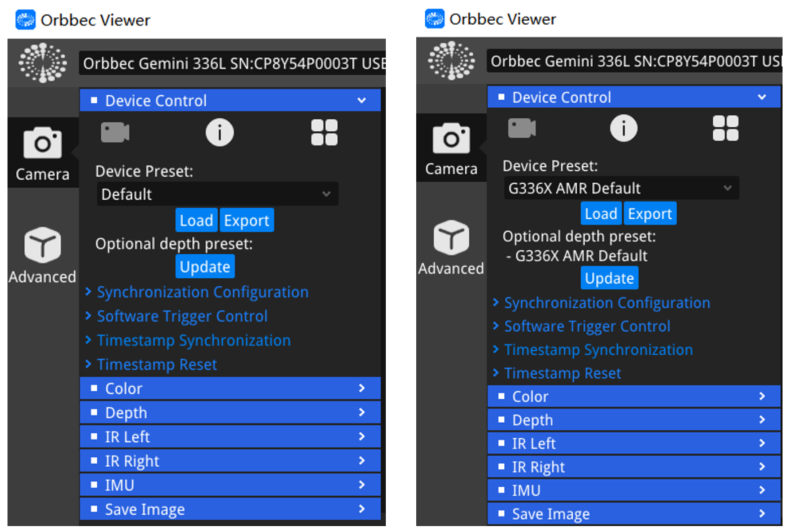
① 相機連接Orbbec Viewer 后點擊Device Control,點擊Optional depth preset 的Update 按鈕,選擇需要加載的Preset 文件,注意:一次最多同時支持3個Preset 的加載,加載后點擊Update 即可更新到Device Preset 中,同時會顯示在Optional depth preset 列表中。
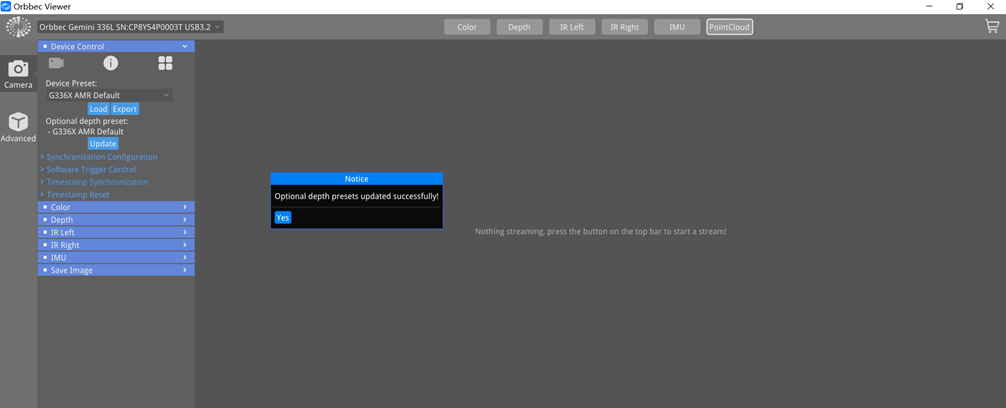
更新成功:
② Optional depth preset 最大支持同時加載3個Preset 的更新,每次更新將覆蓋替代之前的Optional depth preset
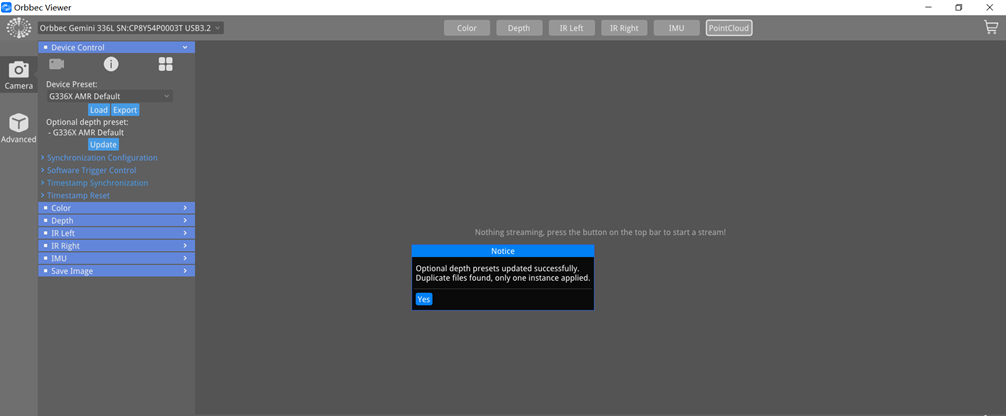
異常處理:
①如果導入存在重復Preset ,會提示存在重復配置,相同僅生效一個
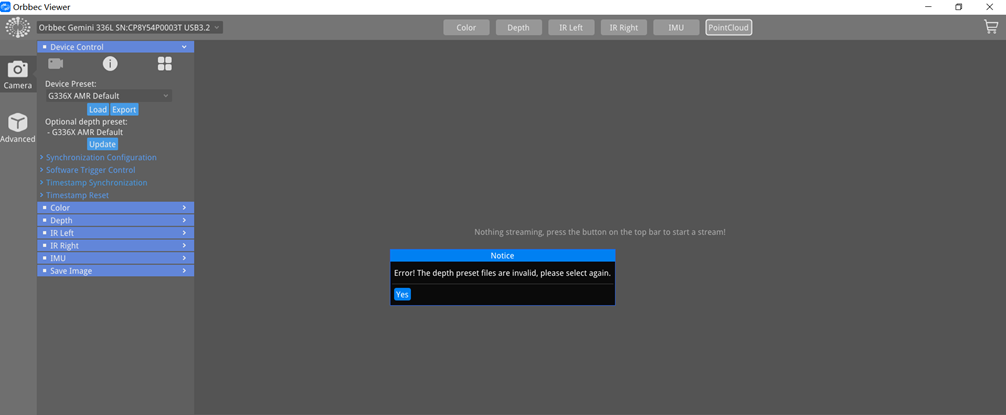
②固件版本不支持或如導入機器不匹配:會提示"Error! The depth preset file are invalid ,Please select again"
3.2 如何通過SDK更新Preset?
/// 1.Create a context to access the connected devices
std::shared_ptr<ob::Context> context = std::make_shared<ob::Context>();
#if defined(__linux__)
// On Linux, it is recommended to use the libuvc backend for device access as v4l2 is not always reliable on some systems for preset update.
context->setUvcBackendType(OB_UVC_BACKEND_TYPE_LIBUVC);
#endif
/// 2. Access the connected devices
auto deviceList = context->queryDeviceList();
std::shared_ptr<ob::Device> device;
if (deviceList->getCount() > 0) {
device = deviceList->getDevice(0);
}
/// 3. update optional depth presets
// Enter your preset file path, please enter 1-3
std::vector<std::string> pathList = {
"/home/user/preset1.bin",
"/home/user/preset2.bin",
"/home/user/preset3.bin"
};
uint8_t index = 0;
uint8_t count = static_cast<uint8_t>(pathList.size());
// OB_PATH_MAX is defined as 1024
char(*filePaths)[OB_PATH_MAX] = new char[count][OB_PATH_MAX];
// copy paths
for(const auto &path: pathList) {
strcpy(filePaths[index++], path.c_str());
}
// update optional depth presets
try {
device->updateOptionalDepthPresets(filePaths, count, [&](OBFwUpdateState state, const char *message, uint8_t percent) {
std::cout << "Message: " << message
<< " percent: " << percent << "%" << std::endl;
});
// No exception if the upgrade is successful
delete[] filePaths;
filePaths = nullptr;
}
catch(ob::Error &e) {
// Receive an exception if an error occurs
std::cerr << "Error message: " << e.what() << "\n" << std::endl;
delete[] filePaths;
filePaths = nullptr;
}