

深度質(zhì)量指標
版本:V1.2
1 專業(yè)術(shù)語
本文檔中出現(xiàn)的專業(yè)術(shù)語縮寫及其解釋如表1所示。
表1 專業(yè)術(shù)語縮寫及其解釋

2 評價指標
評價深度質(zhì)量,需要對深度數(shù)據(jù)從各個方面進行定量計算,然后與標準或者真值進行比較。定量評價深度質(zhì)量的一些常用指標包括:
深度精度(Depth accuracy):通過計算深度數(shù)據(jù)的中值偏差來評估絕對誤差。
空間精度(Spatial Precision):通過計算深度數(shù)據(jù)的均方根誤差來評價空間噪聲。
時域精度(Temporal Precision):評價深度值隨著時間變化的一致性。
填充率(Fill Rate):評估圖像中有效深度像素的百分比。
定量指標要求對深度質(zhì)量進行深入的的量化評估。建立一個穩(wěn)定全面的測試環(huán)境對于準確評估深度傳感器的性能、局限性以及在特定應(yīng)用或者場景中的適用性至關(guān)重要。為了保證深度質(zhì)量評估的一致性,建議使用平整度較高、反射率較高(反射率大于78%)的漫反射板,避免使用復雜的、不穩(wěn)定的測試場景,將高反射率面板放置在距離相機一定距離下,作為測試目標。如果缺乏這樣的測試條件,一個平整度較好的墻面或者白板也可以作為測試目標。每個指標可以在相機視場中任何ROI中計算。

圖1 用于深度質(zhì)量評估的參考平面
1.深度精度
深度精度是指測量的深度值和物體與相機之間的真實距離的一致程度。高精度意味著深度測量值接近于真值,距離估計誤差很小。如前所述,為了簡化深度數(shù)據(jù)的真實值評估,建議在傳感器前一個已知距離的位置放置參考平面,并且可以使用激光測距儀或卷尺等常見測量工具準確確定平面與傳感器之間的距離。
表2 深度精度(有符號)
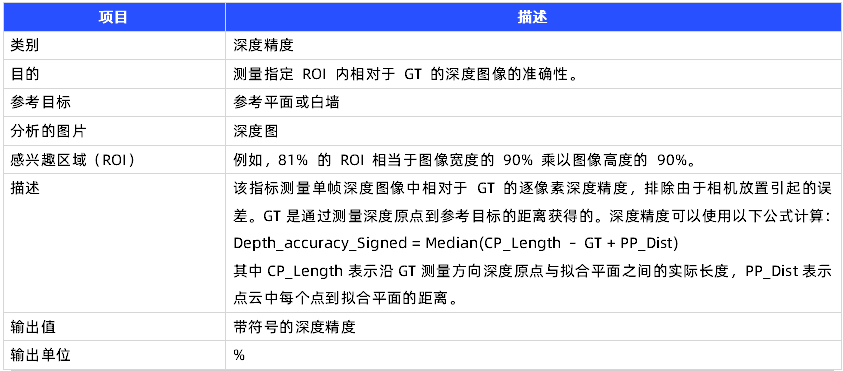
Input:Depth_Image, GT;
Output:Depth_accuracy_Signed
1:去除深度圖中的零點;
2:深度圖轉(zhuǎn)點云;
3:計算點云的擬合平面;
4:去除離群值:所有低于百分之0.5和高于百分之99.5的Z值;
5:計算 CP_Length:光心和擬合平面之間沿著真值方向的實際長度;
6:計算 PP_Dist:所有點到擬合平面的距離;
7:計算深度誤差 Depth_Error = CP_Length – GT + PP_Dist;
8:計算中值 Median_Value = 50% percentile value of Depth_Error;
9:計算深度精度 Depth_accuracy_Signed = 100 * Median_Value / GT;
2.空間精度
深度精度評估的是與真實深度的系統(tǒng)性偏差,而空間精度則評估深度的一致性。空間精度反映了平面目標上深度的噪聲水平。高空間精度的深度表現(xiàn)為,在同一場景中相同或相似表面的深度值顯示出低方差。為了評估空間精度,可以在已知位置對參考平面進行測量,計算所得深度值的均方根誤差,并將其與期望的精度閾值或標準進行比較。
均方根誤差可以用距離或視差的單位表示,但考慮到深度與噪聲之間的耦合,這一誤差可以通過相機與平面目標之間的距離進行歸一化,并以百分比(%)單位表示。
表3 空間精度
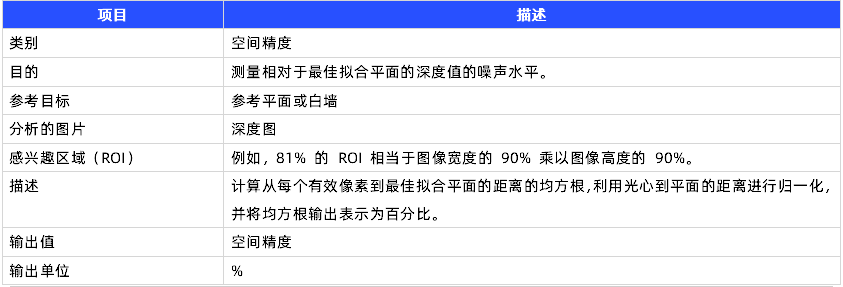
Input:Depth_Image
Output: Spatial_precision
1:去除深度圖中的零點;
2:深度圖轉(zhuǎn)點云;
3:移除離群值:所有低于百分之0.5和高于百分之99.5的Z值;
4:計算CP_Dist:光心到擬合平面的距離;
5:計算PP_Dist:所有點到擬合平面的距離;
6:計算PP_Dist的均方根RMS;
7:計算空間精度 Spatial_precision = 100 * RMSE / CP_Dist;
3.時域精度
時域精度評估的是感興趣區(qū)域(ROI)內(nèi)深度值隨時間變化的波動。深度圖像的質(zhì)量可以基于其時間上的一致性來評估,高質(zhì)量的深度圖像應(yīng)該表現(xiàn)出隨時間的穩(wěn)定性。這種方法定義為在特定幀數(shù)(例如30幀)內(nèi)深度值的標準差(STD)。時域精度的量化是在每個像素的基礎(chǔ)上進行的,計算的是在指定時間內(nèi)每個像素的標準差與參考距離的比值,單位為%。
表4 時域精度
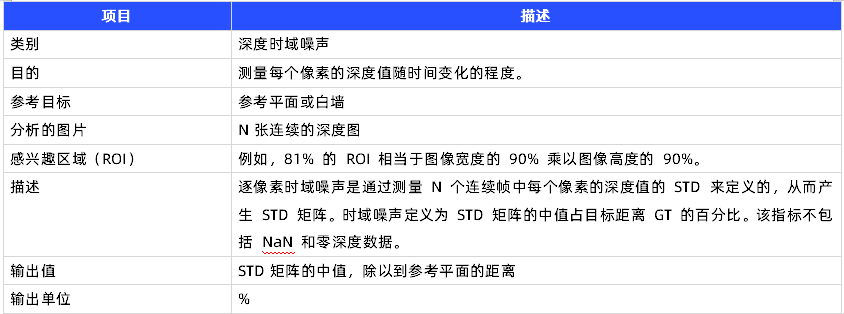
Input:N張深度圖,GT;
Output:Temporal Precision;
1:for 每張深度圖 do
2: Depth_Tensor = (Depth_Image, N);
3:去除Depth_Tensor中的零點;
4:計算STD_Matrix:Depth_Tensor每個像素的STD;
5:計算Median_STD:STD_Matrix的50%百分位數(shù)值;
6:計算Temporal Precision = 100 * Median_STD / GT;
4.填充率
高質(zhì)量的深度圖像應(yīng)該均勻覆蓋整個視野,沒有缺失區(qū)域。填充率是用來衡量深度圖像中非零像素的比例,代表了深度覆蓋的范圍。高填充率表明大部分場景點被成功識別到。
表5 填充率
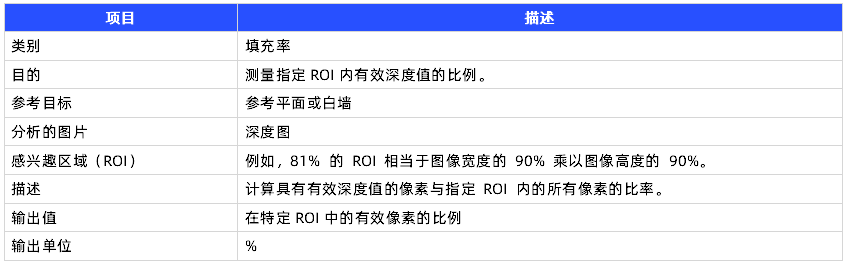
Input:Depth_Image;
Output:Fill_Rate;
1:計算總數(shù)Total_Num = size(Depth_Image);
2:定義Valid_Image = Depth_Image;
3:去除Valid_Image中的零點;
4:計算Valid_Num = size(Valid_Image);
5:計算Fill_Rate = 100 * Valid_Num / Total_Num;